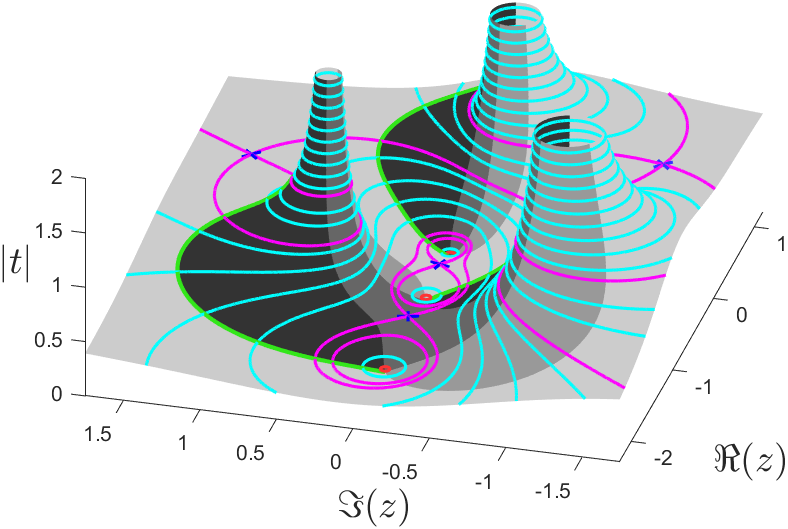
Numerical algebraic geometry uses homotopy methods to solve systems of polynomial equations. We solve hard
problems by setting up a function (the homotopy) that morphs an easy-to-solve problem into the target one,
using numerical methods to track the solution paths.
Numerical algebraic geometry is distinguished from its predecessor, polynomial continuation, by extending
homotopy techniques to handle systems that have higher-dimensional solution sets, such as curves and surfaces, instead
of just isolated solution points. This includes computing the decomposition of a solution set
into its irreducible factors, which may exist at several different dimensions.
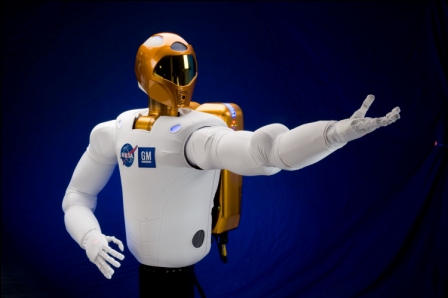
In addition to developing new algorithms, I research applications of these methods, with a specialty in
kinematics, sometimes called "the geometry of motion." This is particularly relevant to the motion of robotic devices.
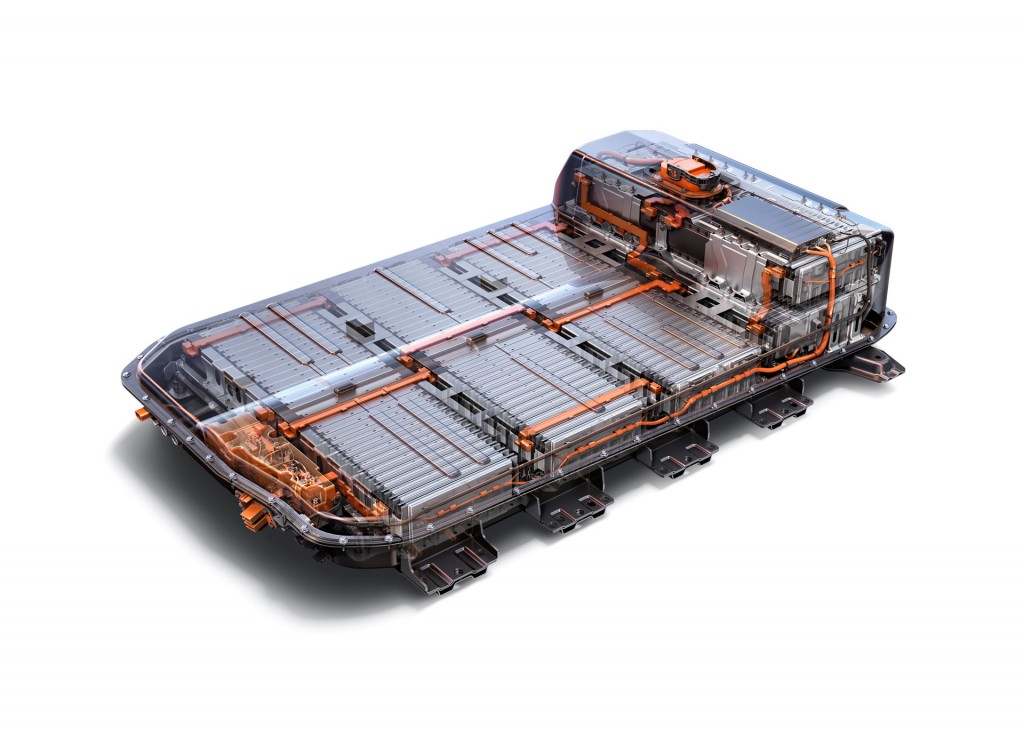
For most of my career, I worked in industrial R&D. I concentrated mainly in robotics, but I also worked on mathematical
models of batteries for EVs.