My Industrial Career
From 1985 to 2023, I worked at the General Motors R&D Center in Warren, Michigan, as an applied
mathematician and engineer, bringing innovative methods to bear on GM's products and processes.
For three decades, I concentrated on various aspects of mechanical motion, sometimes on the side
of designing the product (e.g., windshield wipers, steering and suspension, engine valving), but
mostly concentrating on robotics, with application to manufacturing vehicles. Then, in 2015, I
switched areas to finish my industrial career working on mathematical models of lithium-ion batteries, with a focus on
real-time algorithms for monitoring and managing the large batteries that power electric vehicles.
Robots for Manufacturing
Not every research project makes it all the way to production. One that did was our Programmable
Adaptive Assembly System, whose main component was a 5 degree-of-freedom robot for the production of
automotive vehicles. Standing about waist high, it was a sturdy, high-precision device for positioning
clamps to hold sheet metal panels while larger robots welded them together. A dozen or more of of
these robots coordinated their motions in close proximity to each other, reconfiguring in a few
seconds to allow production of several different vehicles on the same equipment. This was a significant
advance in flexibility compared to the alternative of tearing down an assembly line to swap out
one set of dedicated fixtures for new ones. We built the first development systems completely in-house,
but when GM decided to make it a standard across all
of their highly automated plants, we transferred it to FANUC to become their C-Flex robot.
Robonaut2
Significant engineering projects typically involve a big team. The most exciting project in my GM career
was a joint project with NASA to develop Robonaut2, a.k.a. R2, a humanoid robotic torso. With two 7-DOF (degrees of freedom) arms and highly dexterous hands, it had the capacity to closely mimic human motion. Replete with over 350 motion and force sensors, along with a stereo camera system in its head, the robot was an outstanding platform for work in autonomous dexterous manipulation and human interaction.
The laboratory version we built impressed NASA management to the degree that in April 2010 they elected to send it to the International Space Station
with a launch date that fall, at the end
of the space shuttle program. This kicked off an intense period of reworking the machine for launch and space readiness and then running extensive safety tests. After a scrubbed launch in November 2010, R2 headed for ISS on February 24, 2011 on the last flight of space shuttle Discovery (STS-133 mission). It was subsequently installed in the station's Destiny laboratory, and after a full check-out of R2's motion capabilities in a zero-g environment, the first humanoid-to-human handshake in space took place on February 15, 2012. Expediton 30 Commander Dan Burbank reported, "For the record, it was a firm handshake."
For more details, visit NASA's Robonaut website.
Battery Modeling
Battery modeling was a significant shift in my work, although it did draw on some common ground: my expertise in real-time control and estimation.
The aim of battery management algorithms is to get the maximum performance (range, power, efficiency) from lithium-ion batteries while also
managing the battery's usage for long life.
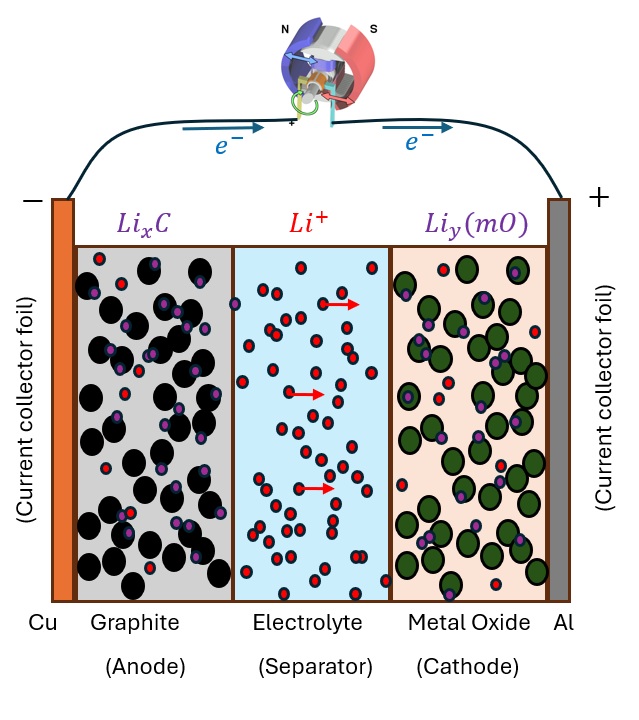
It is surprisingly complex to model in detail how the lithium ions shuttle back and forth as a battery charges and discharges, especially in the dynamic environment of a vehicle. A driver may quickly switch from hard acceleration requiring a large discharge current to hard braking that generates a large regenerative charging current. Regenerative braking converts the kinetic energy of the vehicle back into stored electrochemical energy instead of wasting it as happens in stopping a vehicle with friction brakes. This extends the range the vehicle can drive on a single charge.
The physical processes in a battery, involving electrochemcial reactions, intercalation, and the transport of ions by diffusion and migration, occur at various time scales and happen simultaneously at both the cathode and anode. In addition to formulating and solving differential equations that model these processes, the effort to build a good algorithm depends on developing laboratory protocols and analysis methods to determine the parameters of the model (reaction voltages, diffusion coefficients, etc., for each layer of the battery). Models for off-line laboratory analysis use discretizations of multidimensional partial differential equations, while models for in-vehicle controls use simpler ordinary differential equations that run continuosly in real-time using only limited computing resources.